
NVIDIA Jetson TX2-Camera image capture latency measurement techniques.
- ridgerun

- Dec 4, 2019
- 2 min read
Updated: Sep 9, 2020
For better understanding of this latest blog from RidgeRun, please read the RidgeRun blog on Diving deep into NVIDIA Jetson TX2 - Video Input system and camera image capture latency.
The techniques used to measure the Jetson TX2 image capture latency are outlined in this blog.
Two timestamps are used to measure the latency :
SOF : The first timestamp is taken when the pixels of a frame start to arrive at the VI (t0), this is the start-of-frame (SOF).
The second timestamp is usually obtained at the time when the frame is available on a userspace application (t1).
Techniques can be divided into two main categories, techniques that use the CHANSEL_PXL_SOF (referred to as SOF) and the techniques that do not use the SOF .
Outline of both the methods:
Techniques that use the SOF timestamp

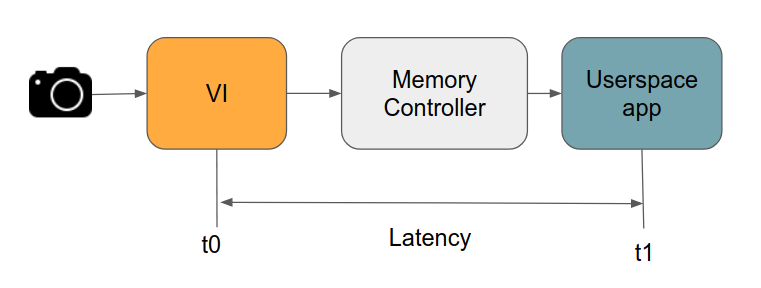
CHANSEL_PXL_SOF can be used as t0 and then, t1 can be the timestamp obtained at the instant when the frame arrives to userspace using ideally the same clock used to set the CHANSEL_PXL_SOF, then the latency can be computed as follows:
Latency = t1 - t0
Techniques that do not use the SOF timestamp
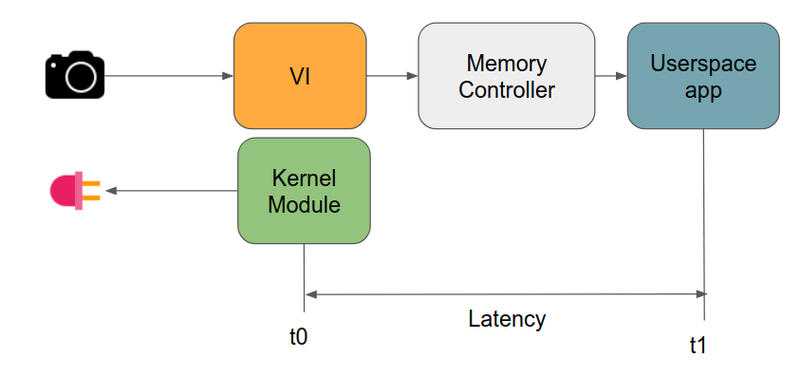
LED test
This test involves the use of a led connected to the TX2 GPIO.
The camera must start capturing when the led is still off, and then a kernel module must turn the led on and then record the current CLOCK_MONOTONIC timestamp to be used as t0. Each image that arrives to user space must be timestamped also with the CLOCK_MONOTONIC at the instant when it's available, this will be t1.

More technical details about the techniques, working with TSC (Time Stamping System Clock) for the latency measurements and rtcpu, v4l2 tracing details are explained in the RidgeRun developer wiki page : NVIDIA Jetson TX2 - VI Latency Measurement Techniques
Contact Us
Please visit our Main Website for the RidgeRun online store or Contact Us for pricing information of the engineering support, product and Professional Services.
Please email to support@ridgerun.com for technical questions and for an evaluation version (if available).
Contact details for sponsoring the RidgeRun GStreamer projects are available at Sponsor Projects page.


